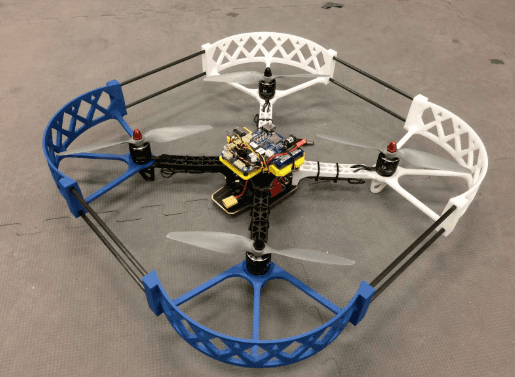
Quad Rotor
Grad School Project
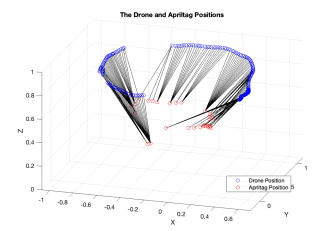
April Tag-Tracking Quadrotor
Project Goal:
Build and program a quadrotor that can track ground-based AprilTag waypoints while maintaining a constant altitude.
System Architecture:
PID control loops for altitude, attitude, and rate control
OpenCV-based computer vision for waypoint tracking
MAVlink data transmission protocol between Beaglebone and Raspberry Pi
Linear Kalman Filter for X/Y control
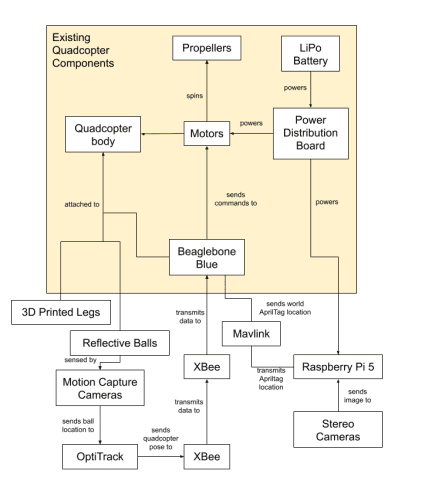
Hardware:
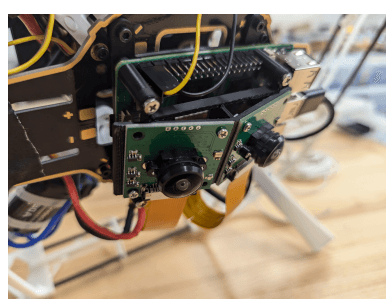
Dual-mounted stereo fisheye lens cameras for visual tracking
Beaglebone Blue microprocessor flight computer
Raspberry Pi 5 visual tracking computer
Optitrack MOCAP system
Performance:
The vehicle demonstrated decent waypoint tracking while maintaining good flight stability and altitude holding. Autonomy architecture was designed such that the quad would perform the following steps in order:
Increase throttles and take off to reach desired altitude
Cameras are activated and look down to see if any AprilTags are in view
If computer vision script detects an AprilTag, use known vehicle attitude and AprilTag pixel location to calculate world-frame X/Y error
Send X/Y error to positional control loop to calculate motor inputs