MBot
MBot
Grad School Project
Visit Website

Project Goal:
Build and program a three-wheeled UGV which utilizes lidar-based SLAM to autonomously navigate a maze. UGV must be able to locate crates in the maze and move them from point A to point B.
System Architecture:
PID control loops for wheel speed, forward body speed, and rotational body speed
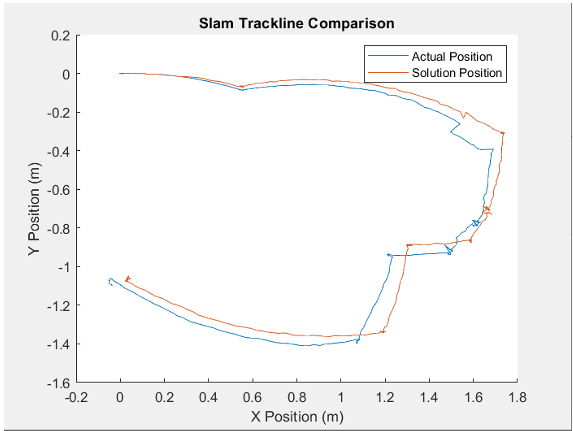
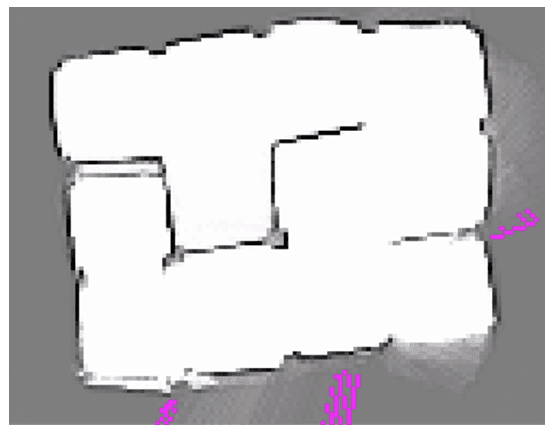
Lidar-based SLAM for mapping and localization
IMU + wheel speed sensors for odometry
A* path planning
OpenCV-based computer vision for crate location and distance estimation

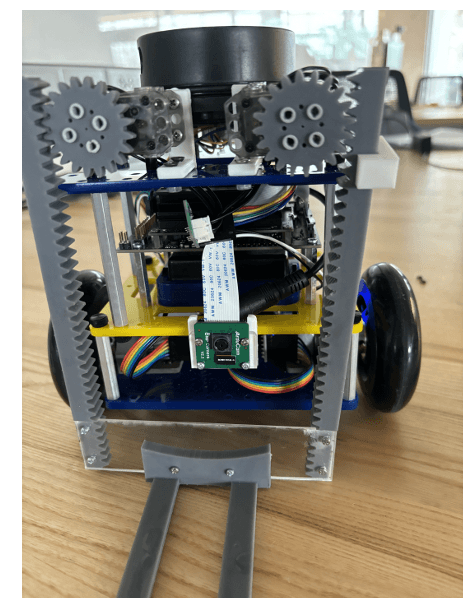
Hardware:
Nvidia Jetson Nano processor
Raspberry pi pico microcontroller
Lidar unit
3d-printed forklift for crate handling
Performance:
The vehicle demonstrated exceptional navigational and control stability while mapping and exploring the maze:
Clear map creation
Good crate recognition and tracking ability
A* demonstrated good functionality in path planning through the maze